I'm an Assistant Professor of Electrical Engineering at Louisiana Tech University (LaTech), Ruston, Louisiana.
I graduated from Embry-Riddle Aeronautical University (ERAU), Daytona Beach, Florida, with a Ph.D. in Electrical Engineering and Computer Science in Dec. 2021 and a M.S. in Electrical and Computer Engineering in Dec. 2017. I was advised by Dr. Shuo Pang.
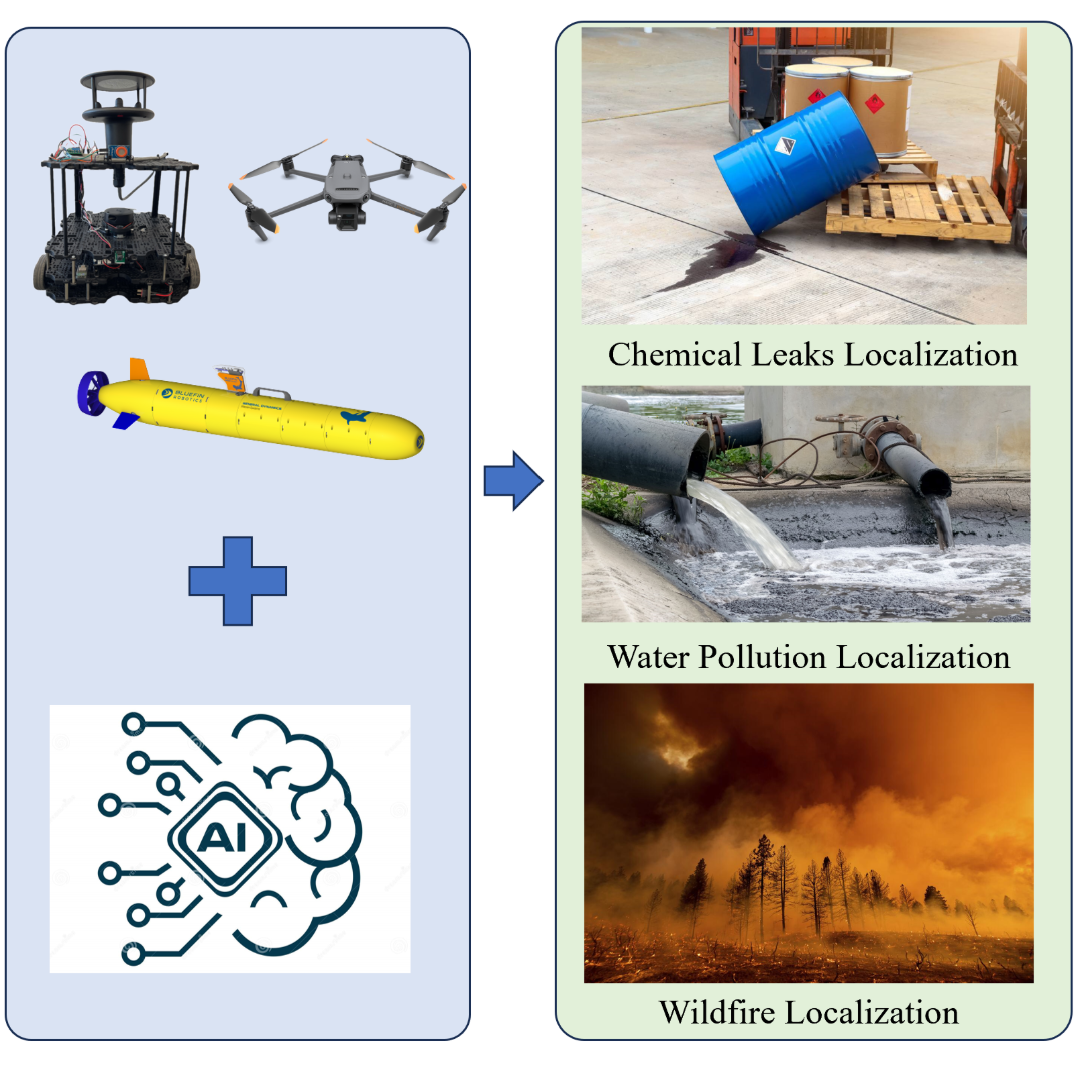
My research involves Robotics, Autonomous Systems, and AI. I focus on developing intelligent decision-making models to navigate and control robots using AI methods.
I'm interested in topics related to the AI and robotics integration, including Computer Vision, Deep Learning, Large Language Models, Reinforcement Learning, Robot Learning, and Transfer Learning. My current and past research projects include the following:
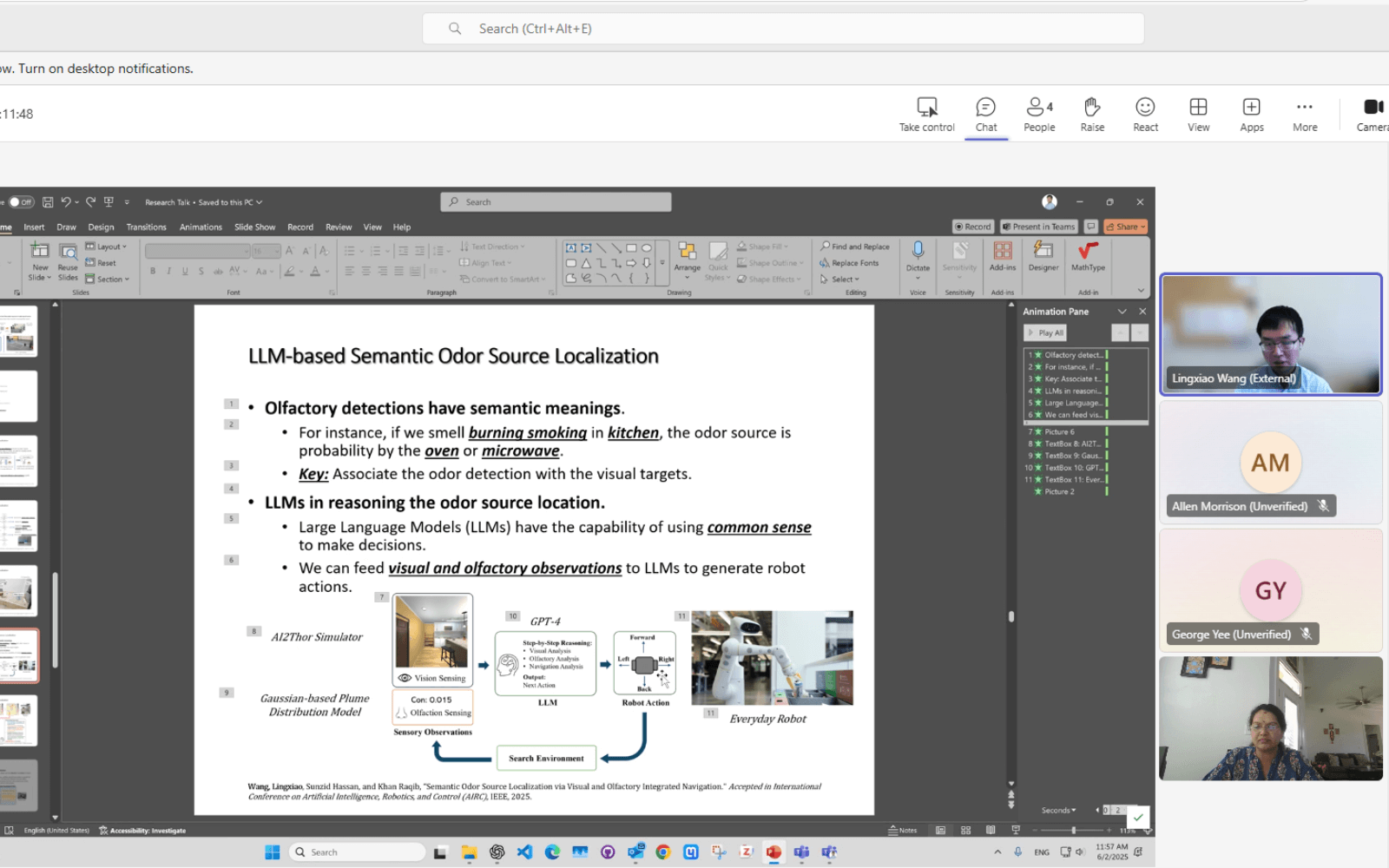
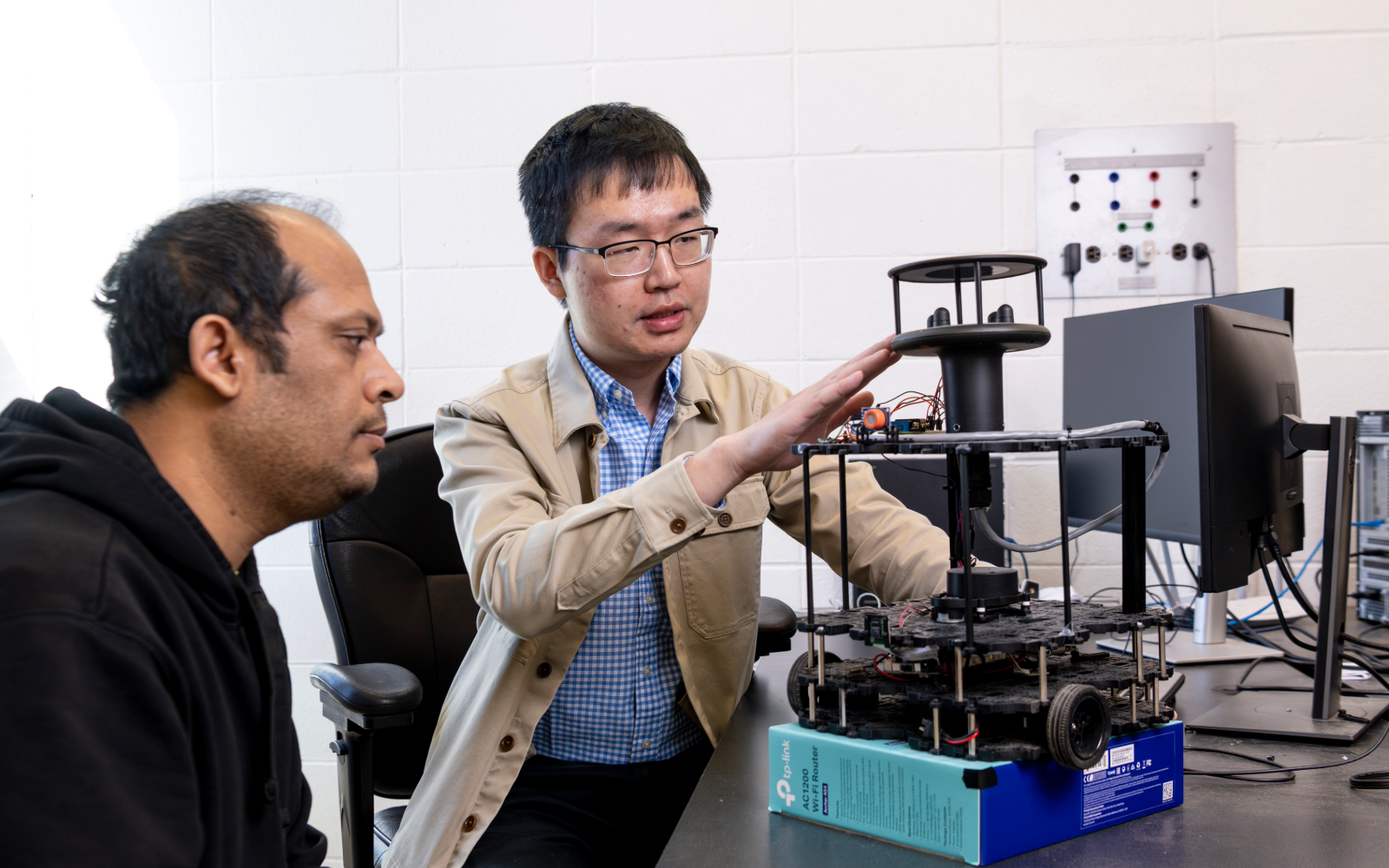
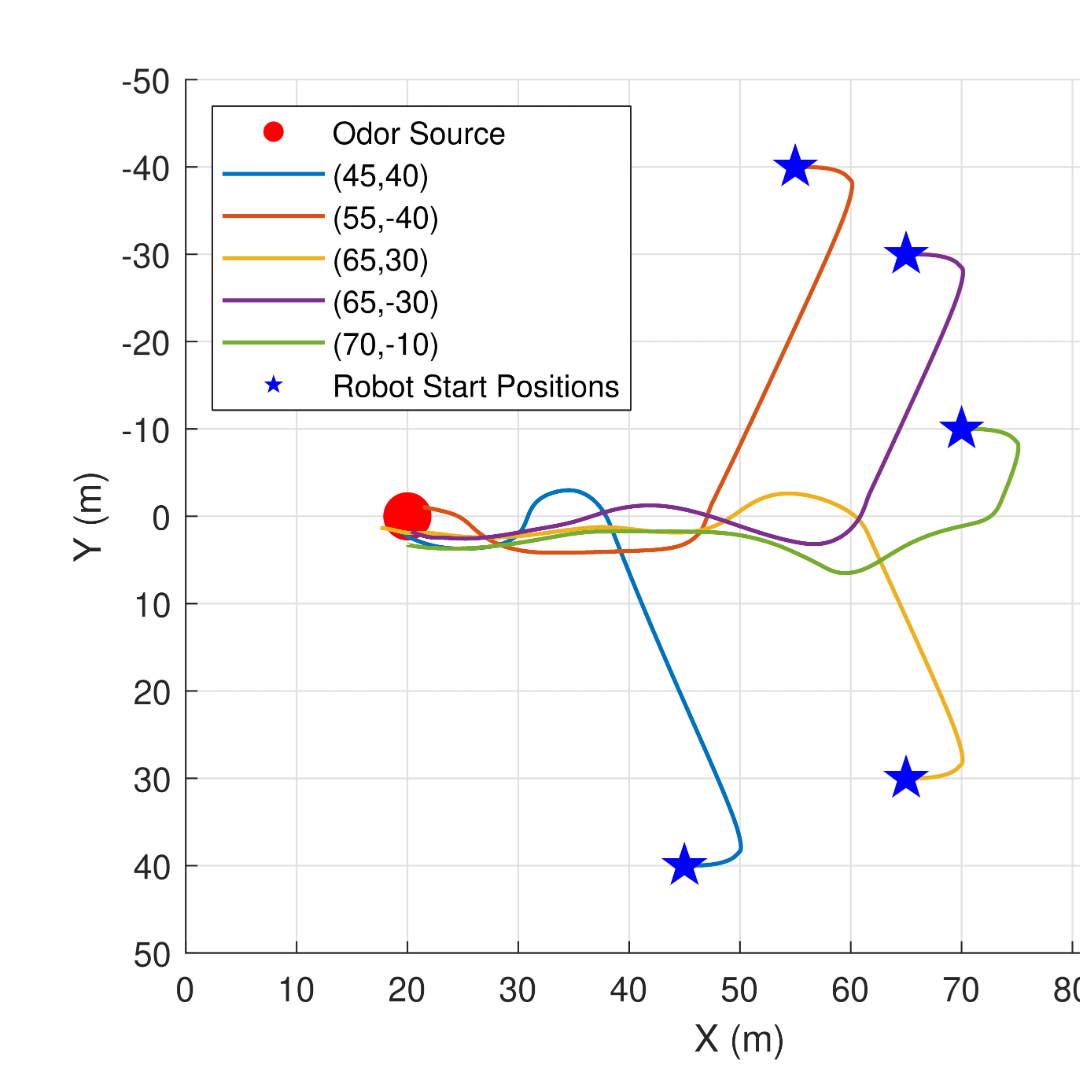
AI-based Robotic Odor Source Localization
2018 - Current, Principal Investigator Latech, ERAU
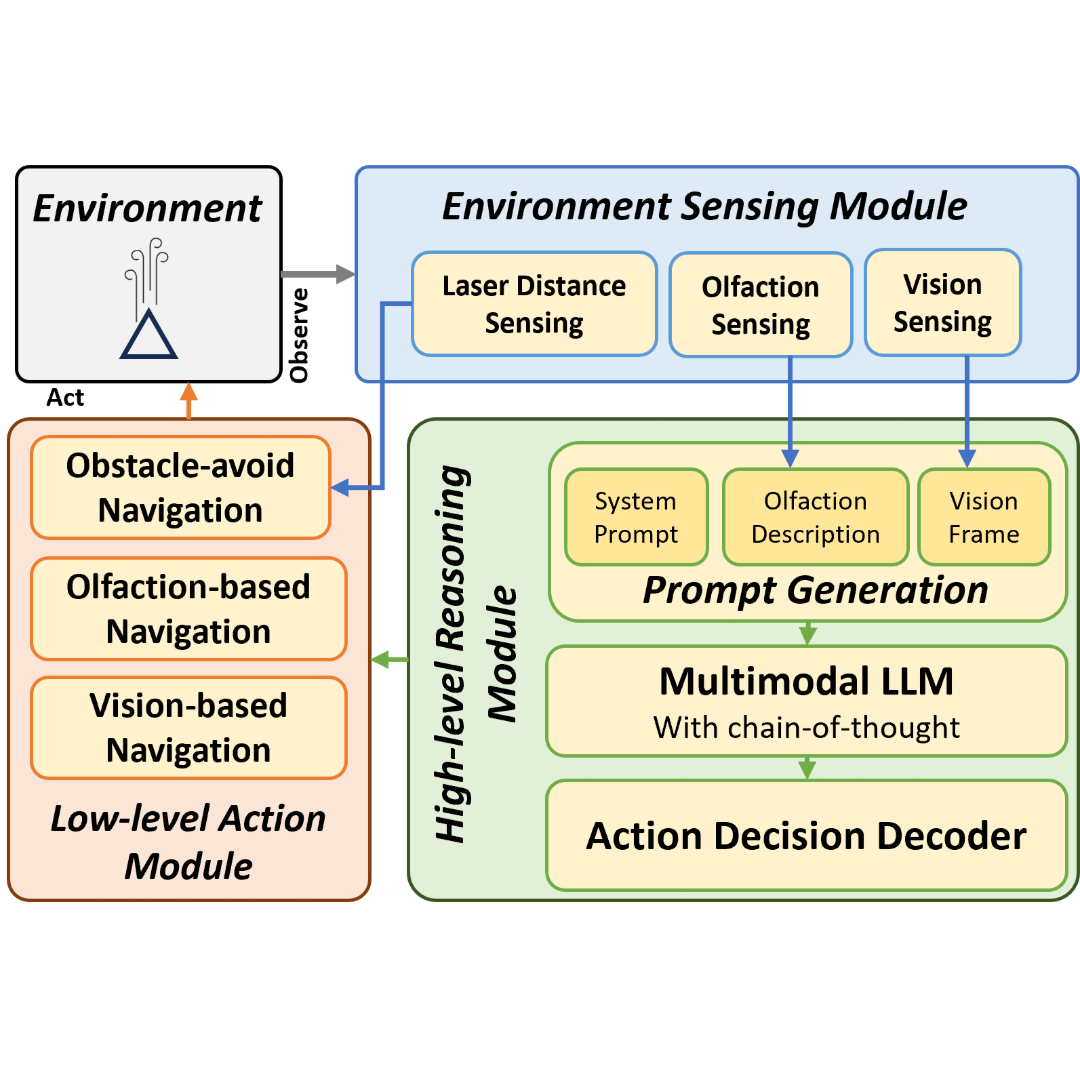
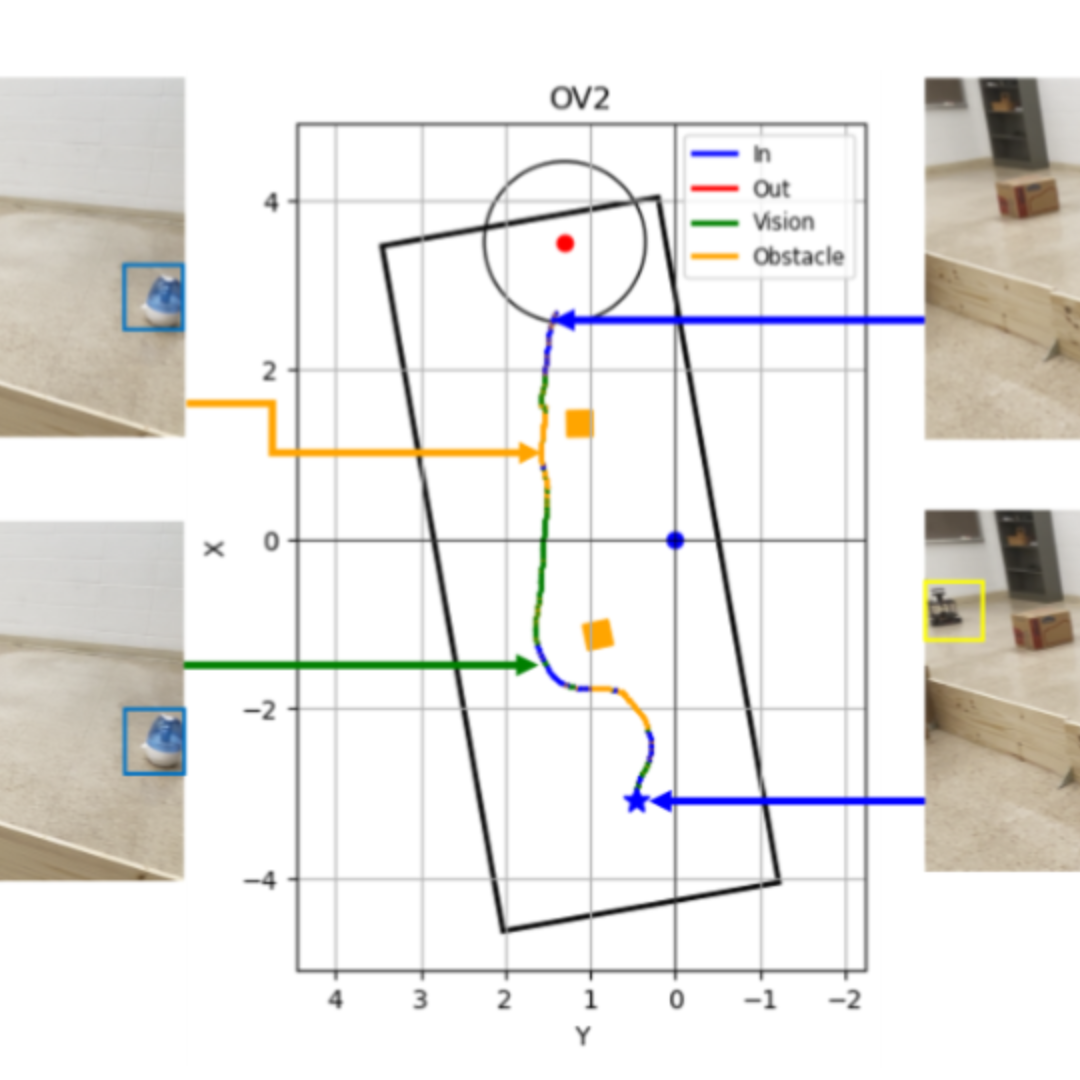
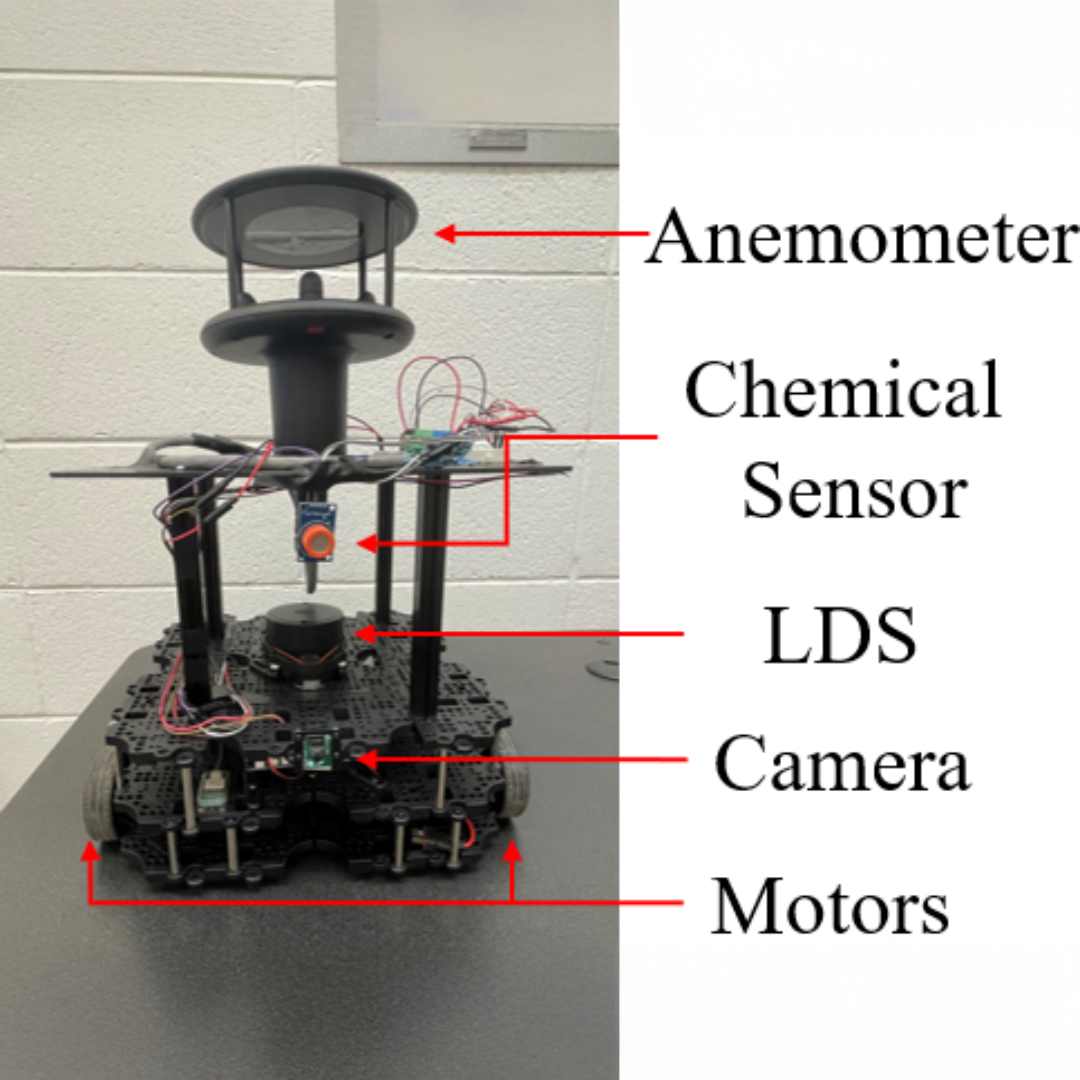
This project leverages various AI techniques to design a navigation model to guide a robot in finding a hidden odor source location with onboard vision and olfaction sensors.
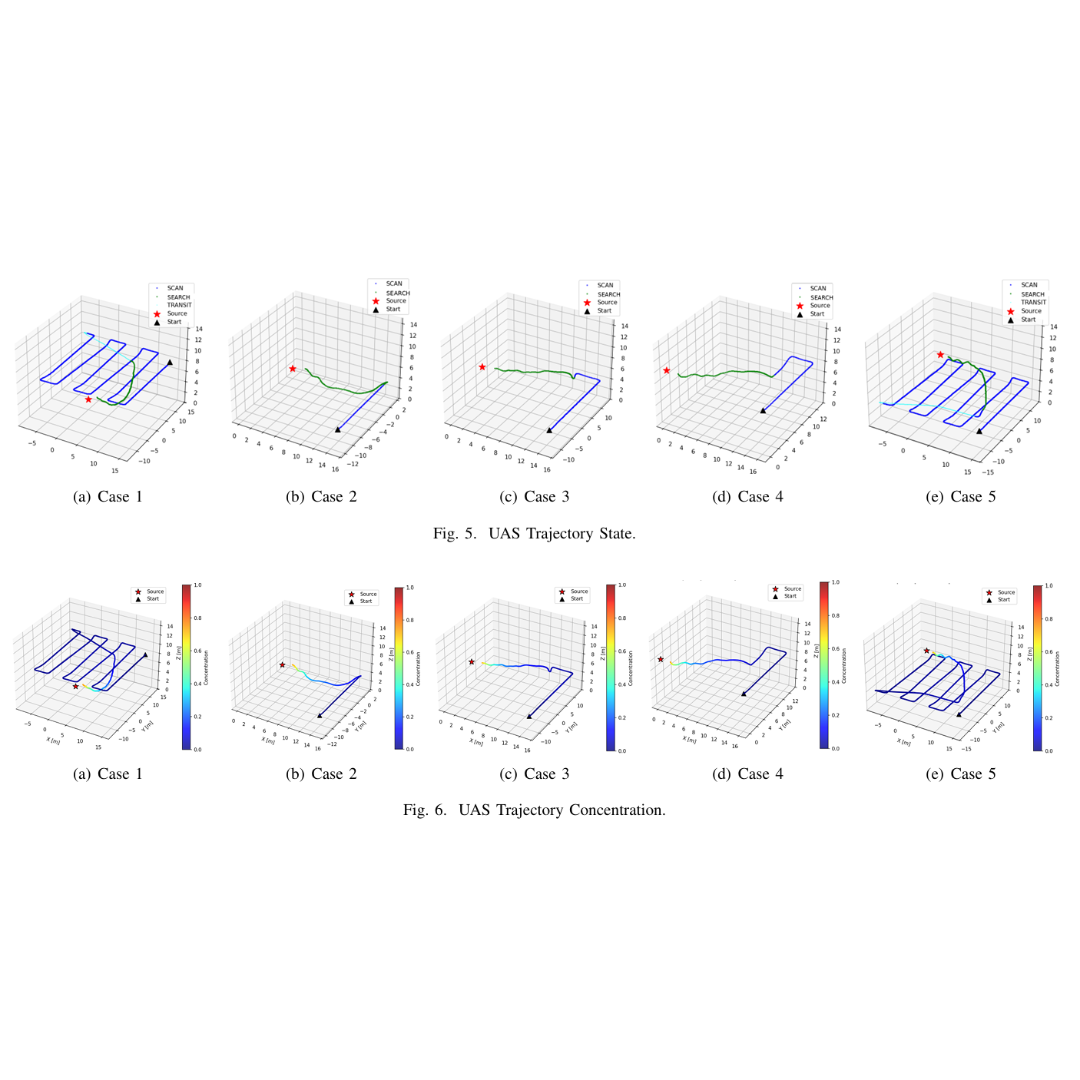
Wildfire Early Detection with Unmanned Aerial Vehicles
2021 - Current, Researcher LaTech, ERAU
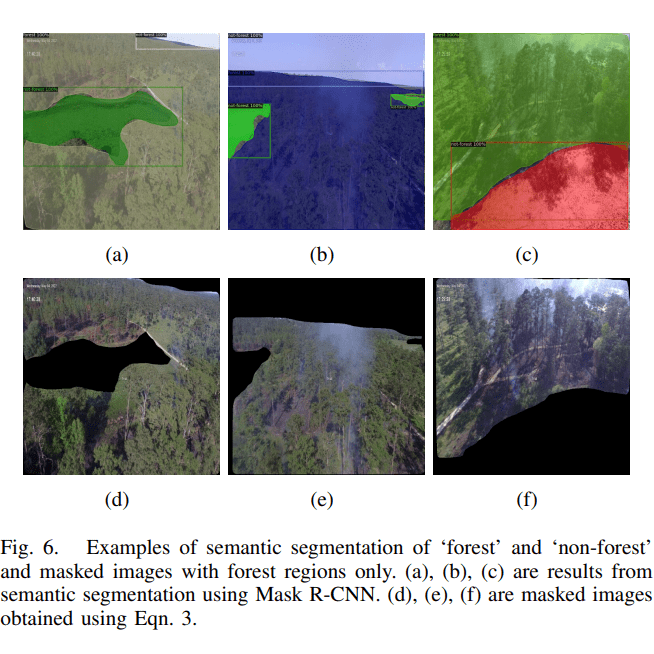
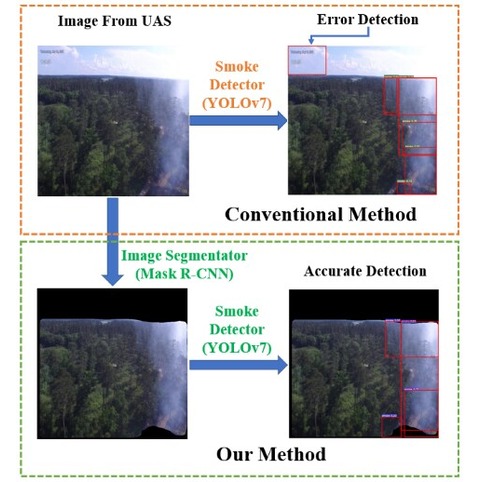
The core of this project is to integrate Computer Vision and Robotic Olfaction to enable a robot (i.e., a drone) "see" and "smell" the environment to detect early wildfire locations.
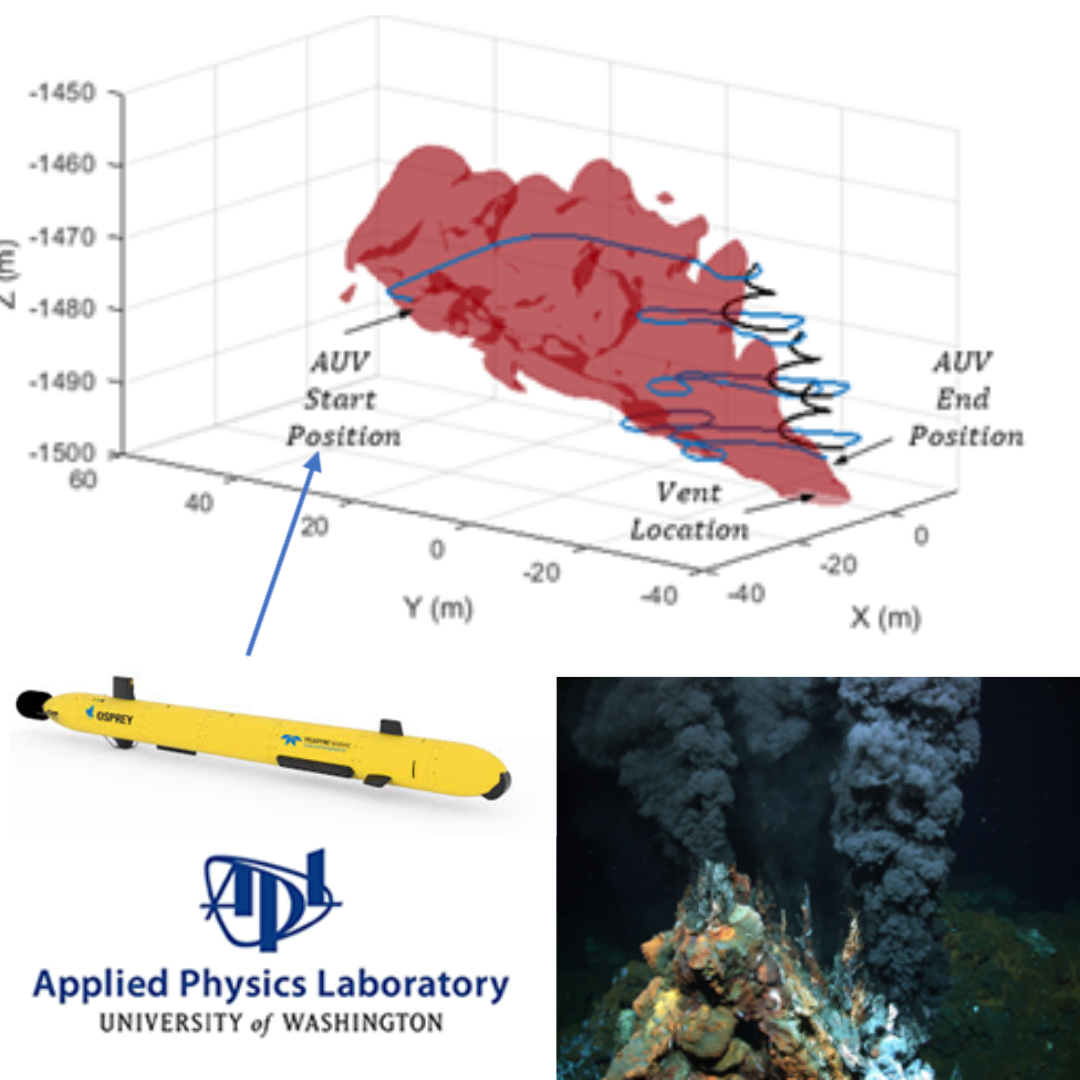
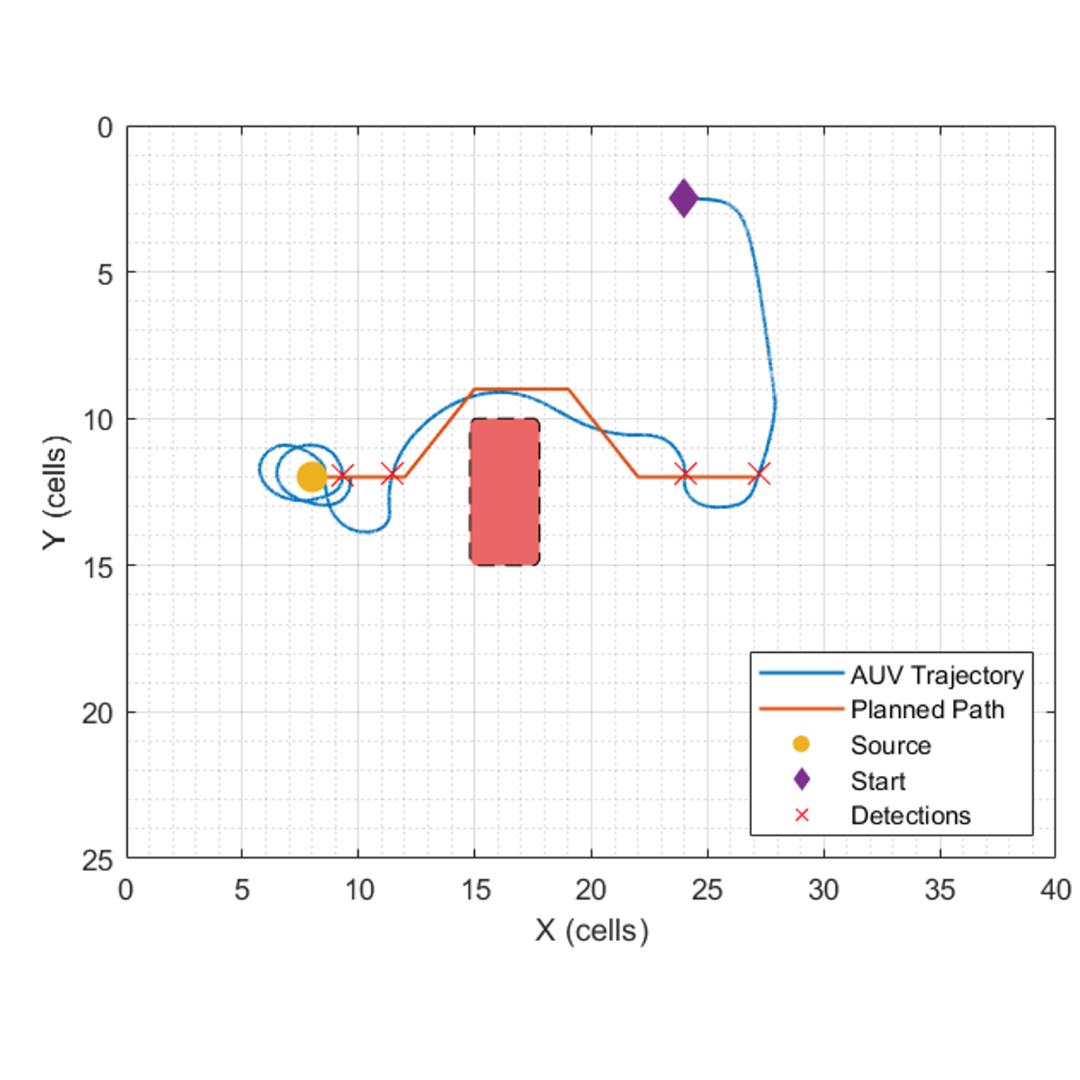
Chemical Plume Tracing with Autonomous Underwater Vehicles
2018 - 2022, Research Assistant ERAU
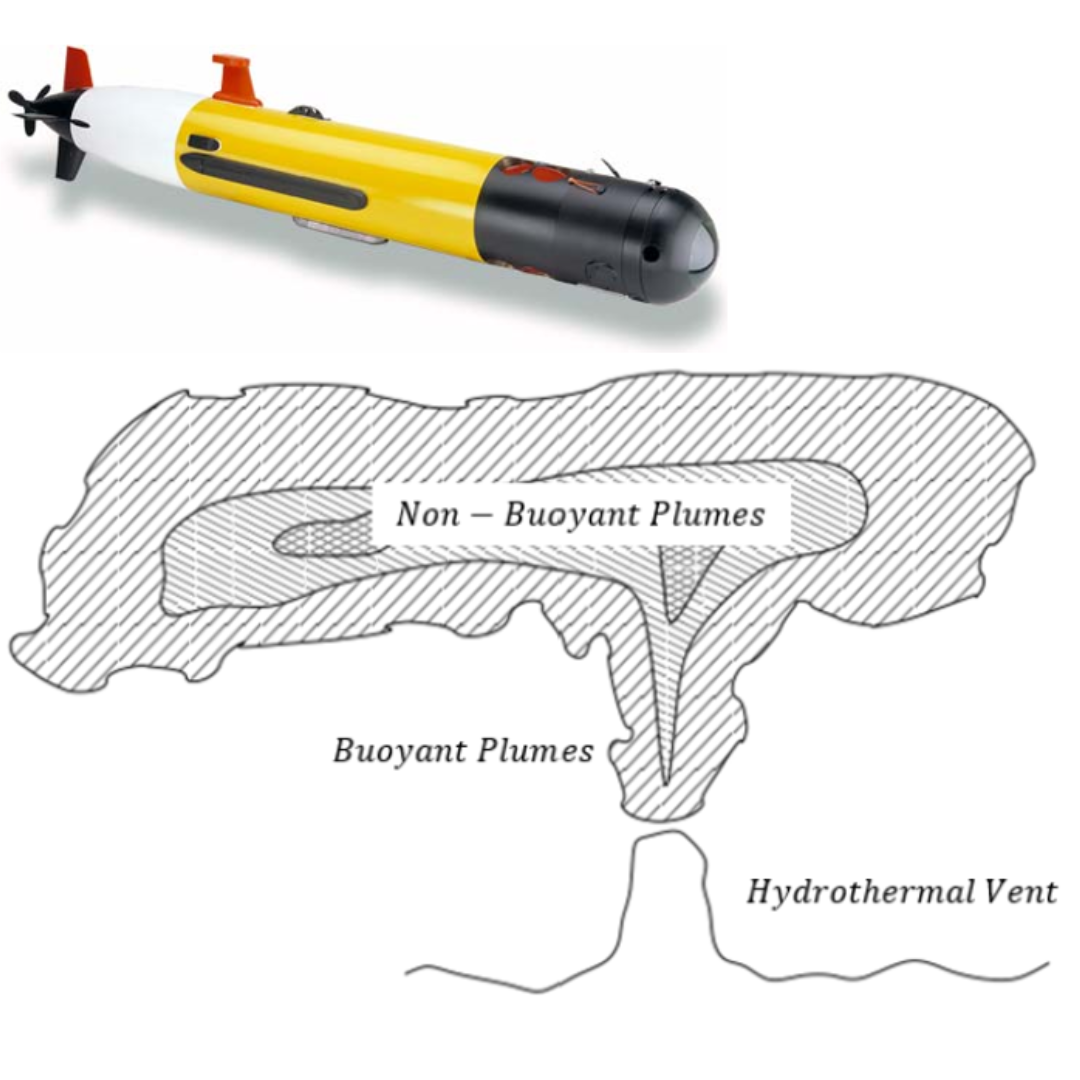
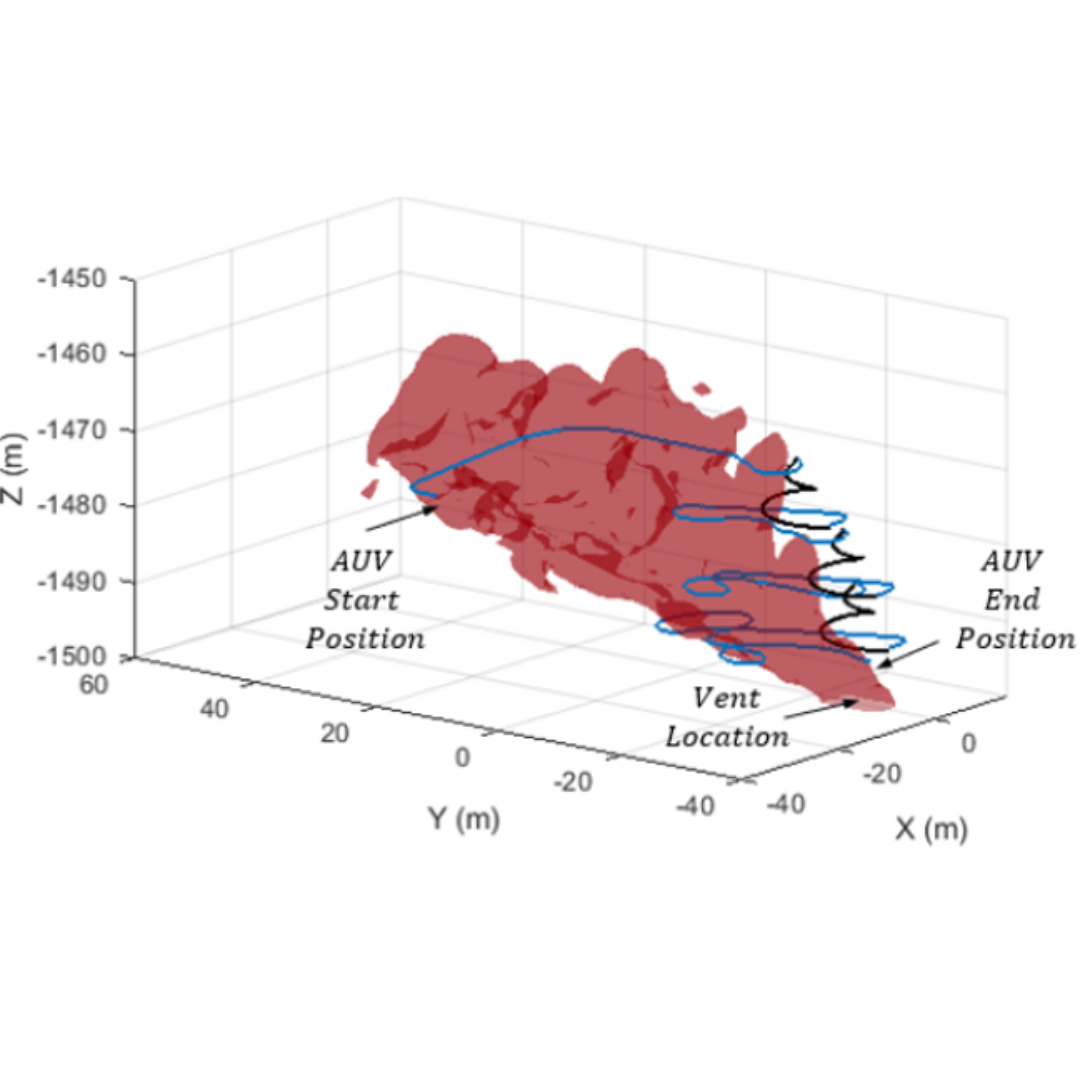
This project focuses on developing navigation algorithms (i.e., chemical plume tracing algorithms) to control an autonomous underwater vehicle to discover hydrothermal vents within ocean environments.
This project was collaborated with Dr. Guangyu Xu at Applied Physics Laboratory of University of Washington.
Sponsors
2026
May 2026
🏭 05-22: We visited Trinity Gas Storage to test our CO2 gas monitoring system. Thanks for the opportunity and coordination!
April 2026
🔍 04-10: NSF awarded our CRII Proposal. Thanks for the support!
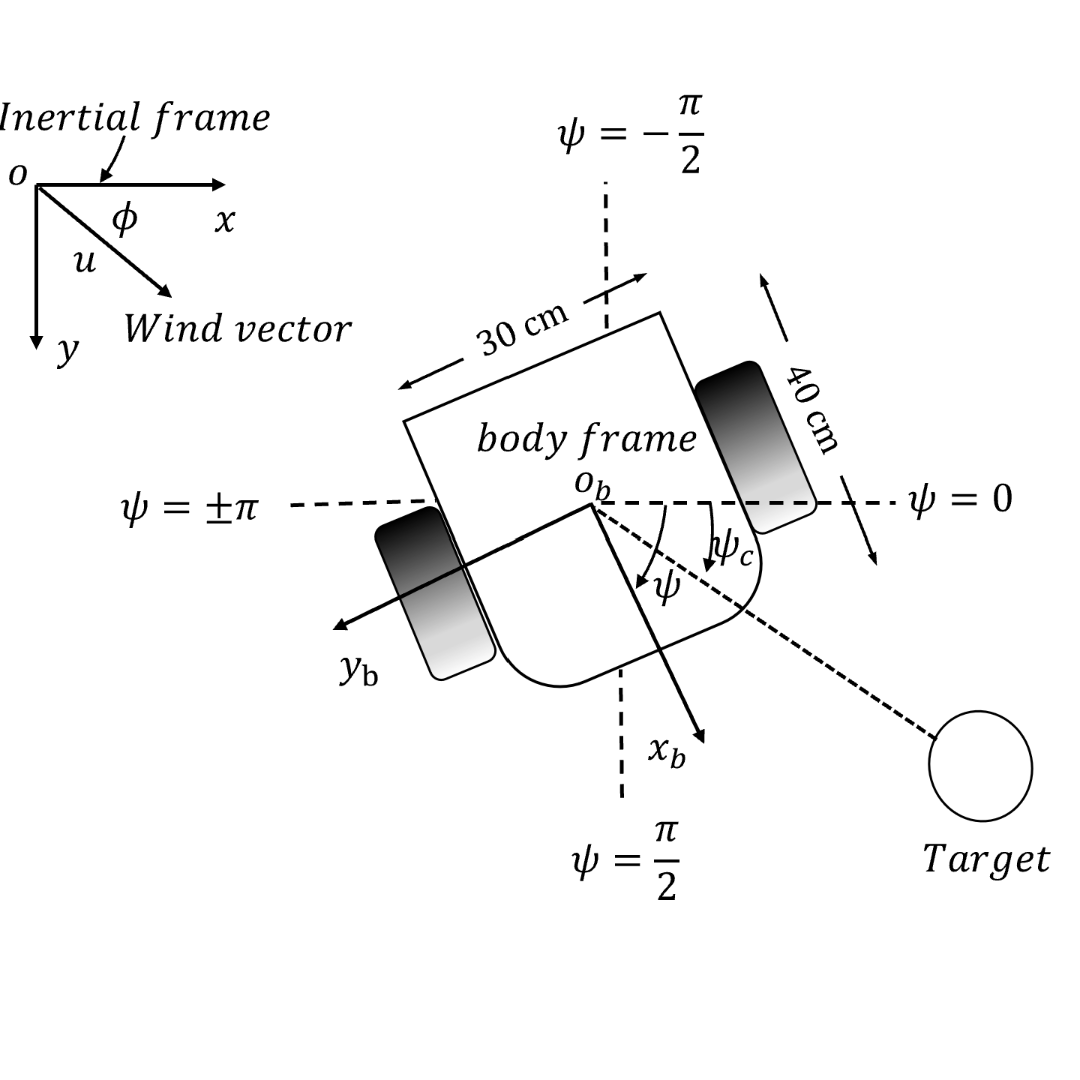
Proposed a Hierarchical Control framework to control a robot finding the odor source by coordinating obstacle avoidance, vision-based navigation, and olfaction-based navigation behaviors.
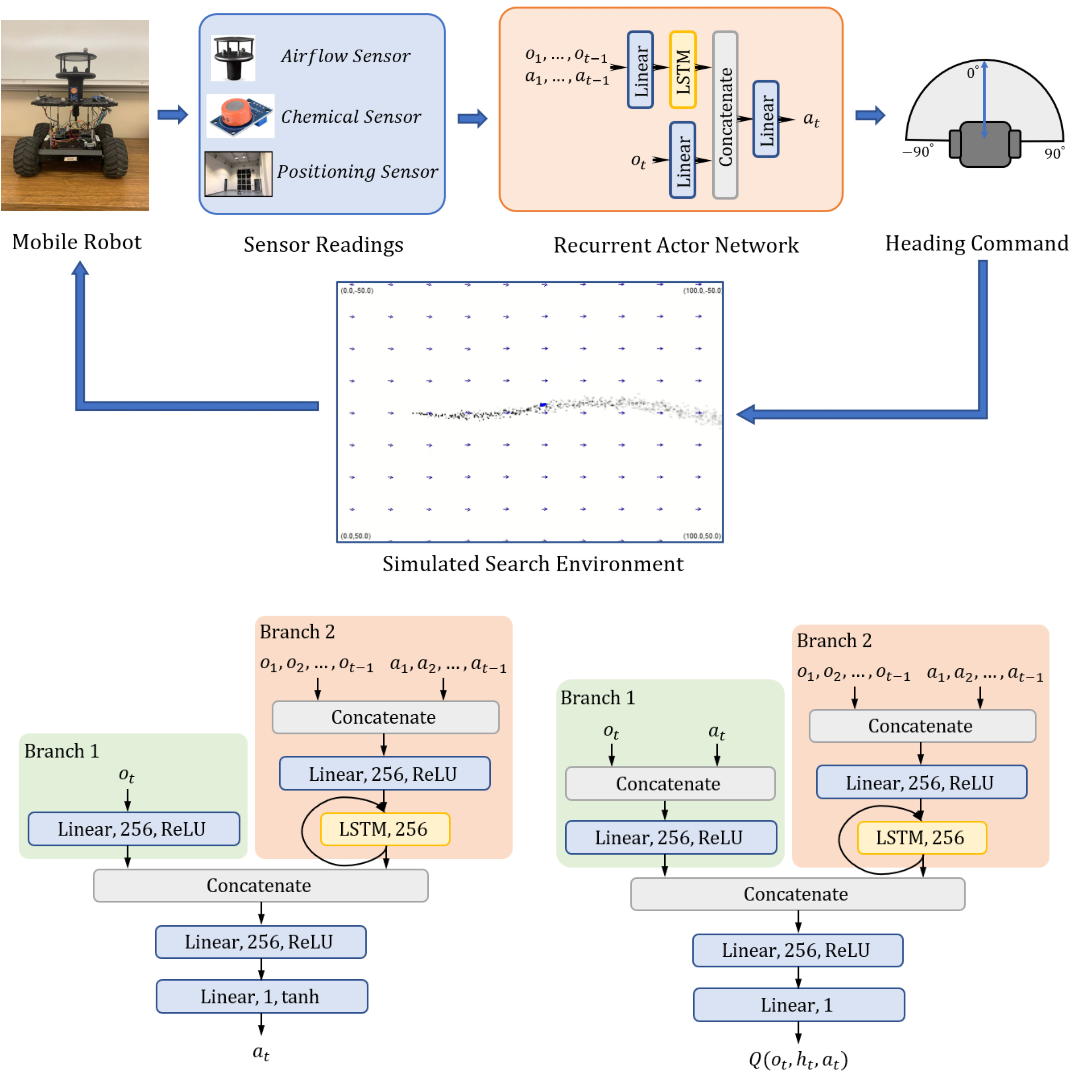
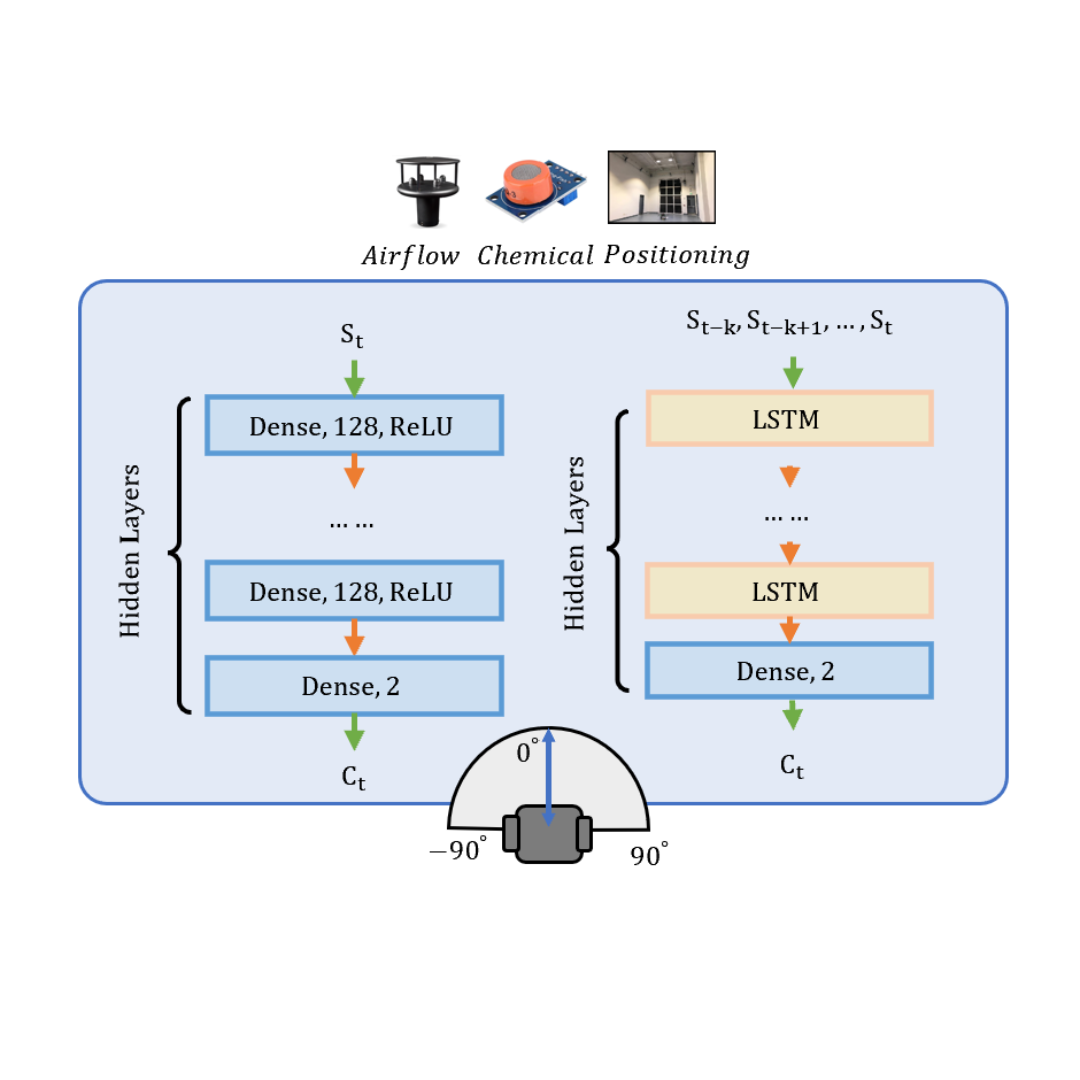
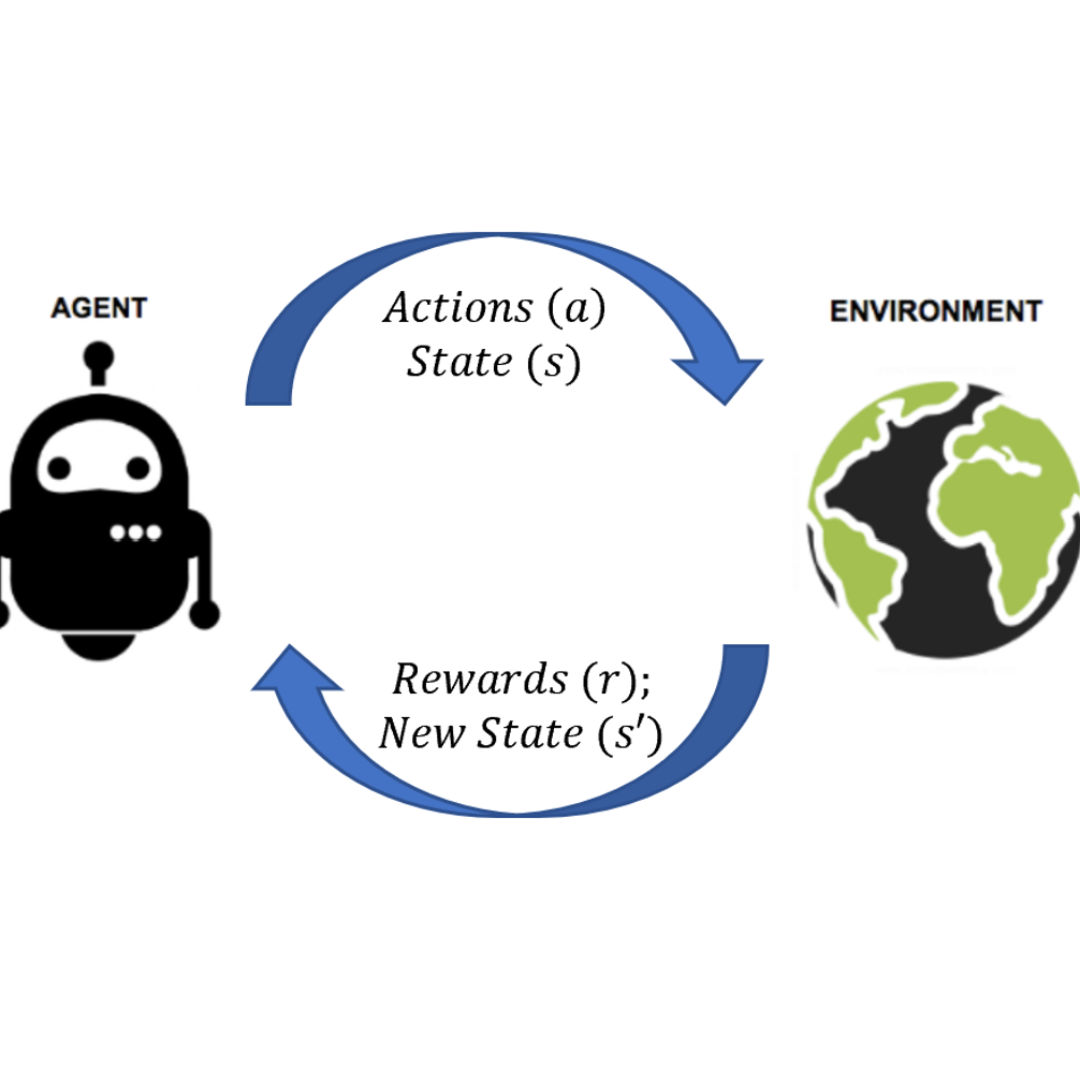
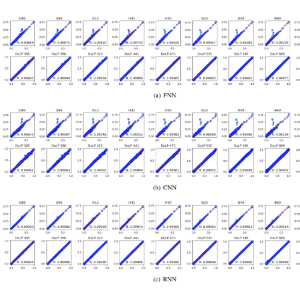
Integrated Twin Delayed Deep Deterministic Policy Gradient (TD3) with recurrent neural network (RNN) and implemented in the robotic odor source localization task.
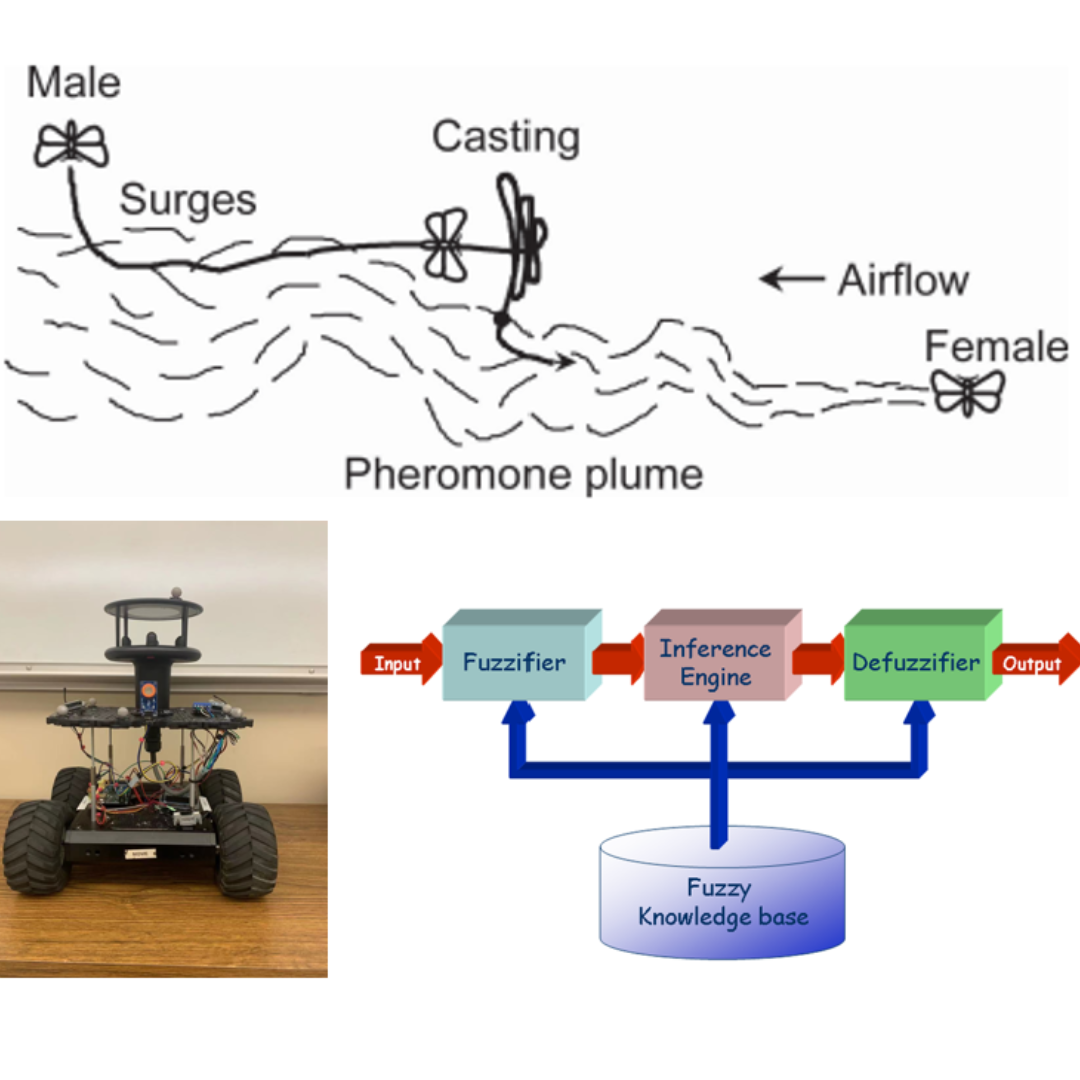
Improved the traditional moth-inspired odor source localization algorithm with a fuzzy inference system to adaptively change search parameters and behaviors.
Designed a robot navigation algorithm for finding a hidden odor source. Two steps are involved: 1. Source & Plume Mapping (fuzzy inference) 2. Path Planning (RL).
Presented a new vision-based wildfire smoke detection from drone's imageries, which involves image segmentationa and object detection to reduce the false alarm rate.
Implemented Extended Kalman Filter and Unscented Kalman Filter to determine AUV locations based on IMU (acceleration), Doppler Velocity Log (velocity), and Short Baseline (position) measurements.
Teaching is a cornerstone of my academic career. I'm teaching courses related to Control Theories, Artificial Intelligence, and Robotics. I offer the following courses per academic year:
ELEN 471: Automatic Control Systems
Every Fall Quarter 🍂 Electrical Engineering, LaTech
Syllabus: This course is an introduction to automatic control systems. You will learn (i) how to develop mathematic models, (ii) use various numerical methods to analysis control systems, and (iii) develop different controllers to control the system.
ELEN 472/572: Introduction to Digital Control Systems
Every Winter Quarter Electrical Engineering, LaTech
Syllabus: This course focuses on digital control systems. We will cover (i) digital signals, (ii) digital system modeling, (iii) digital control theories, and (iv) real-world examples of digital control systems.
Every Spring Quarter 🌱 Electrical Engineering & Computer Science, LaTech
Syllabus: This course is an introduction of AI, focusing on hands-on experience of various AI techniques. You will learn various AI techniques, covering the past 20-year AI developments. Each topic comes with a real-world example to demonstrate how to use AI techniques to solve real-world problems.